|
Xu Weng (翁旭) xu009@e.ntu.edu.sg I received my PhD degree from Nanyang Technological University in 2025, where I was fortunate to be supervised by Prof. KV Ling and supported by Nanyang Research Scholarship. Priorly, I received a B.Eng. from Nanjing University of Aeronautics and Astronautics in 2015, as well as a M.Eng. from Beihang University in 2018, both in Electrical Engineering. I worked as an R&D engineer at Keysight Technologies from 2019 to 2020. My research focuses on spatial awareness in the internet of things, especially human-centered localization from a data-driven perspective. |

|
Research |

|
NeRC: Neural Ranging Correction through Differentiable Moving Horizon Location Estimation
Xu Weng, KV Ling, Haochen Liu, Bingheng Wang, Kun Cao ACM/IEEE SenSys, 2026 (Acceptance Rate: 19%) code / arXiv A data-driven framework for correcting ranging errors, which is trained end-to-end using location-related loss. When combined with Euclidean distance field cost maps, NeRC can be trained using unlabeled data. |
|
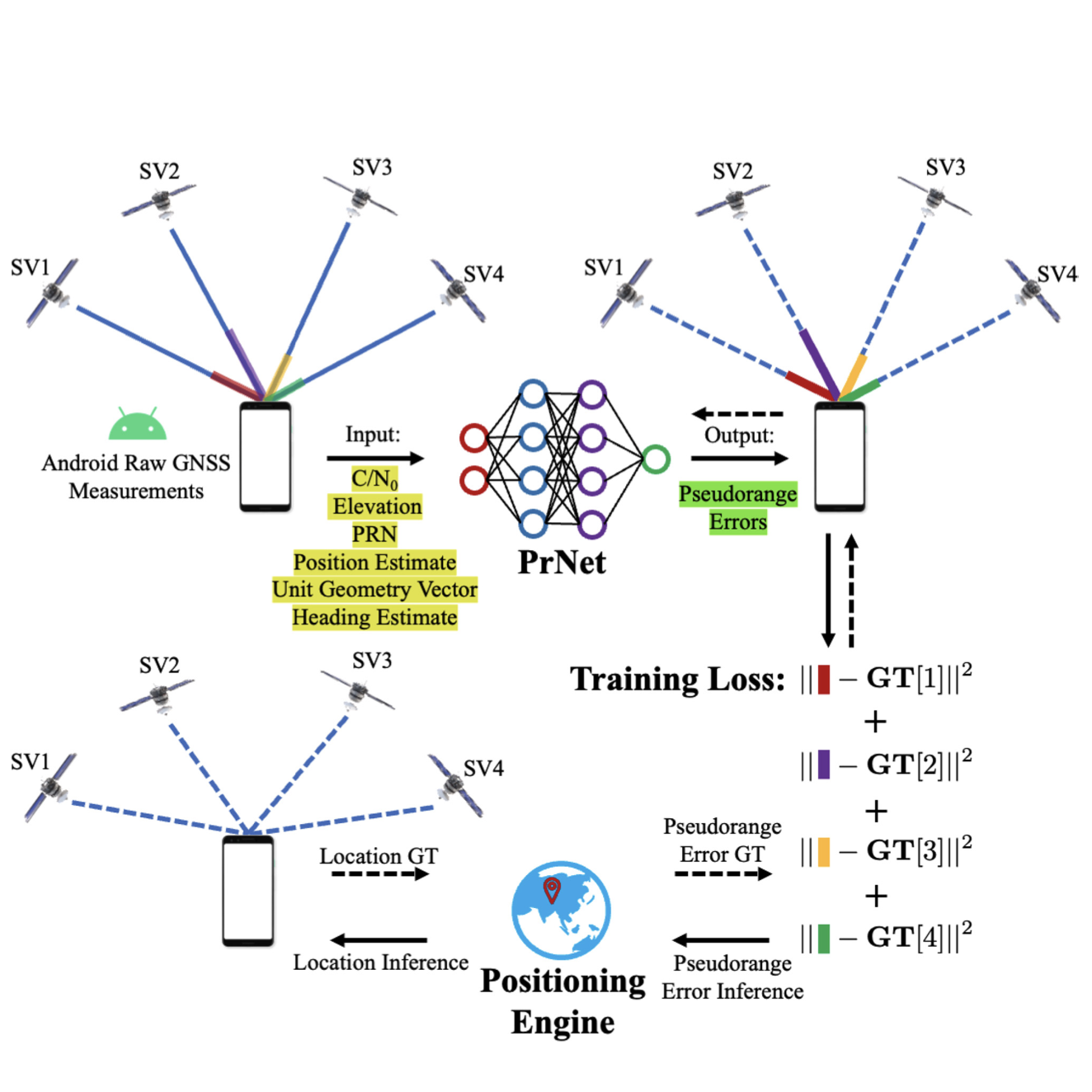
PrNet: A Neural Network for Correcting Pseudoranges to Improve Positioning With Android Raw GNSS Measurements.
Xu Weng, KV Ling, Haochen Liu IEEE IOTJ, 2024 code / arXiv A satellite-wise MLP is designed to regress pseudorange errors from six satellite, receiver, context-related features derived from Android raw GNSS measurements. A novel method for labeling pseudorange errors are proposed. |
|
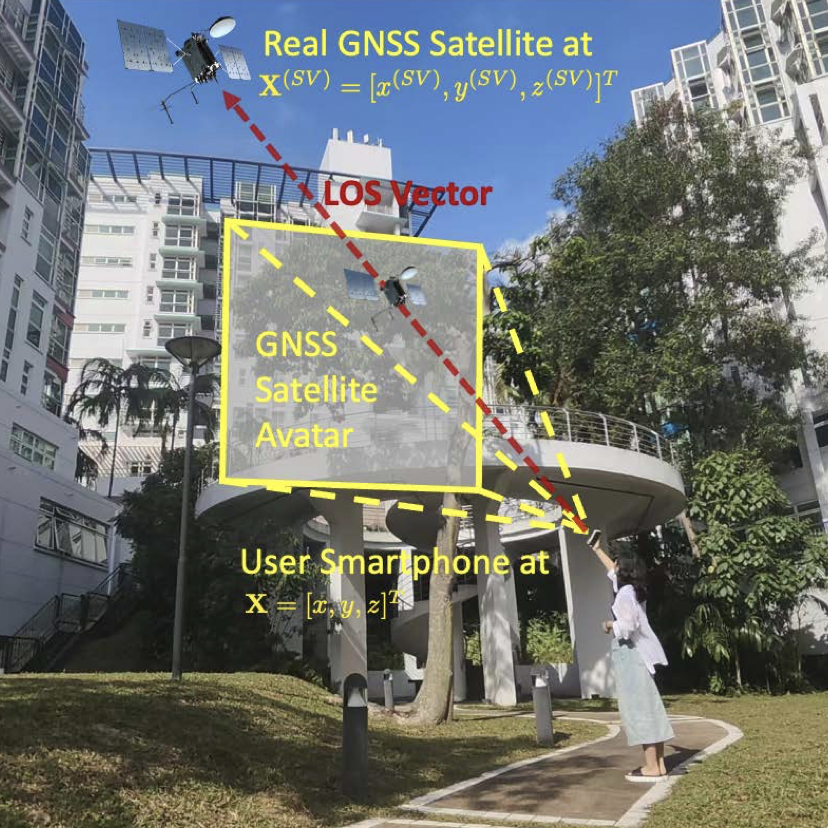
GnssQuest: Questing for Suitable GNSS Satellites through Augmented Reality
Xu Weng, Yuhui Jin, KV Ling ACM SenSys Poster Abstract, 2024 An Augmented Reality (AR)-assisted framework to help exclude Non-Line-of-Sight (NLOS) satellites to improve GNSS localization using mobile devices. |
|
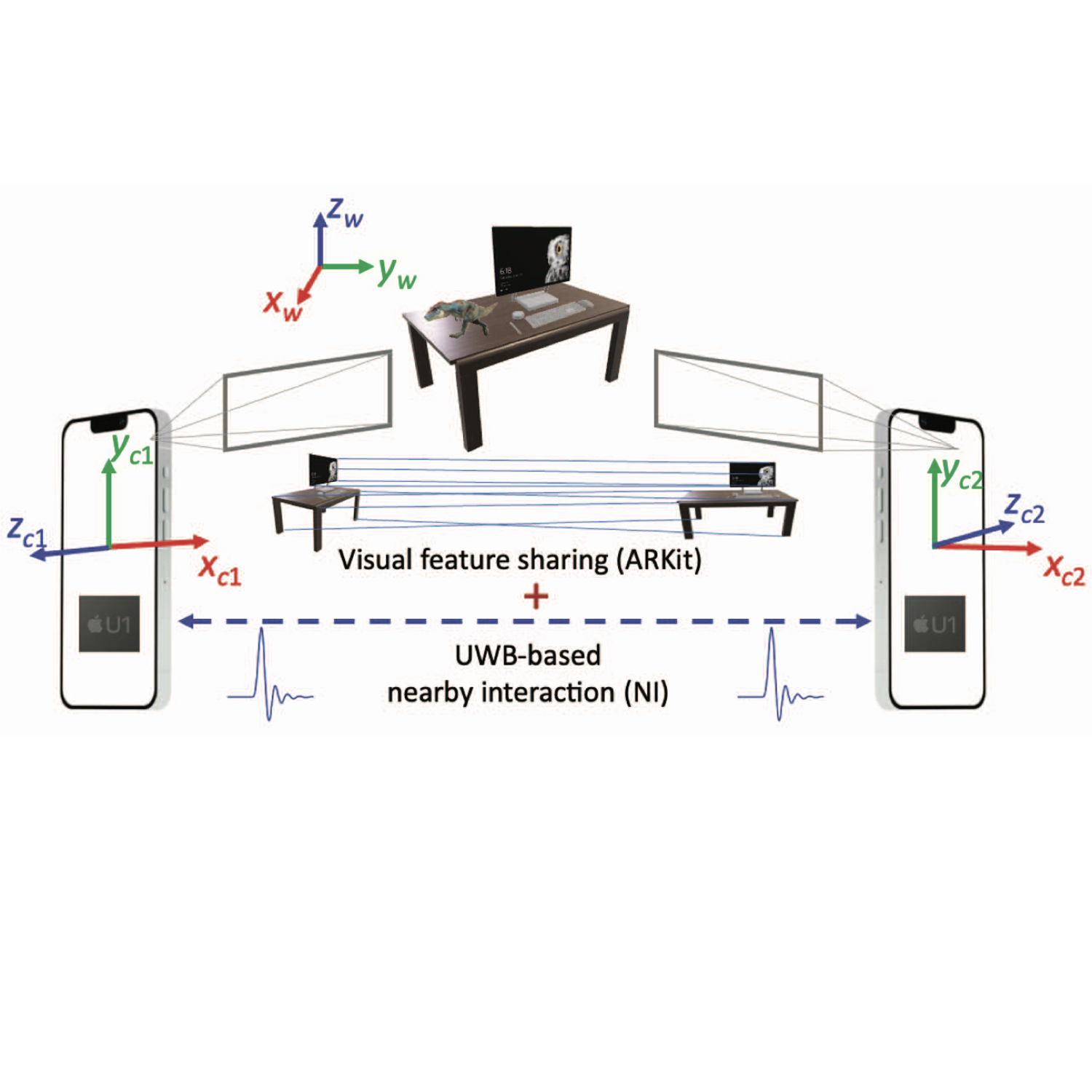
UarLogger: Logging Measurements from UWB and AR Sensors on iOS Devices
Yuyang Zhang*, Xu Weng*, KV Ling (* Equal contributions) ACM/IEEE IPSN Poster Abstract, 2024 (Best Poster Runner-up Award) code A tool to log the relative location measurements from UWB and AR sensors mounted on iOS devices, as well as context-related data. |
|
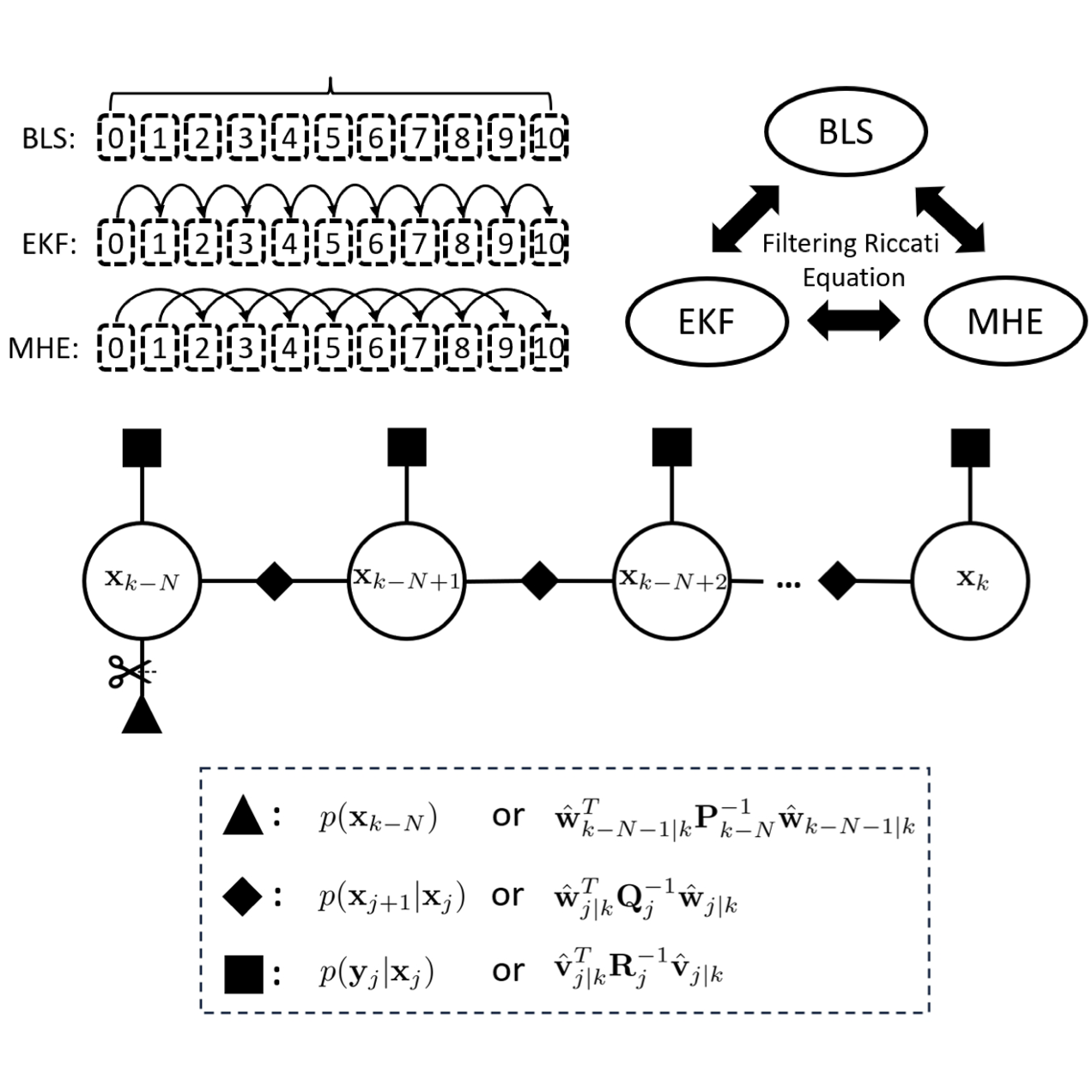
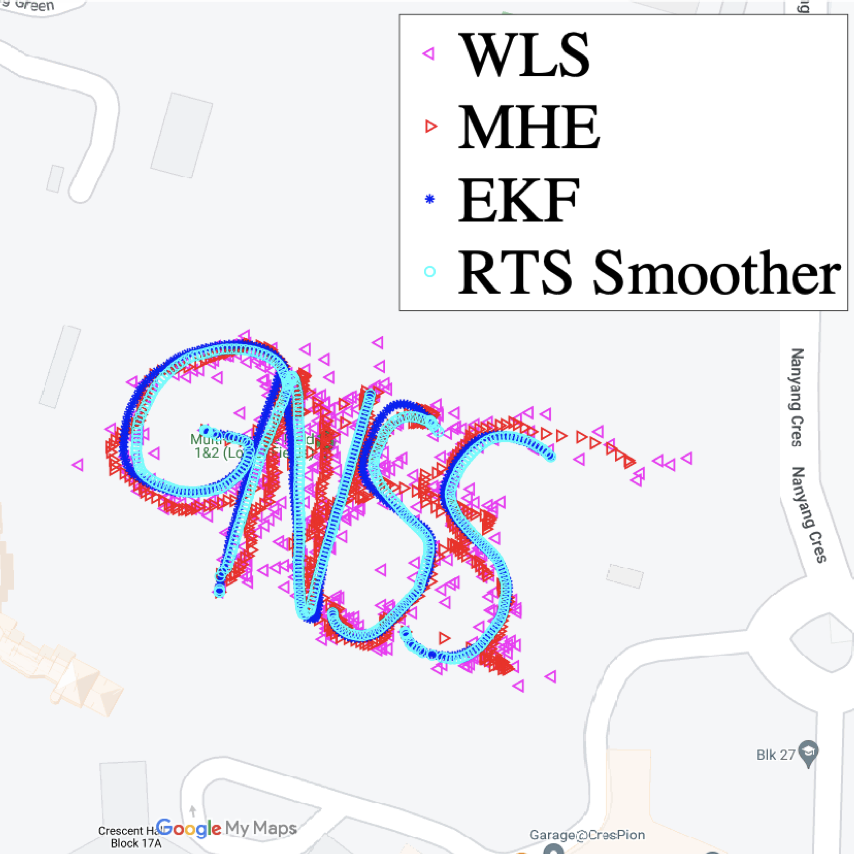
Receding Horizon Recursive Location Estimation
Xu Weng, KV Ling, Ling Zhao Preprint, 2025 arXiv A framework unifying extended Kalman filter (EKF), factor graph optimization (FGO), and moving horizon estimation (MHE). |
|
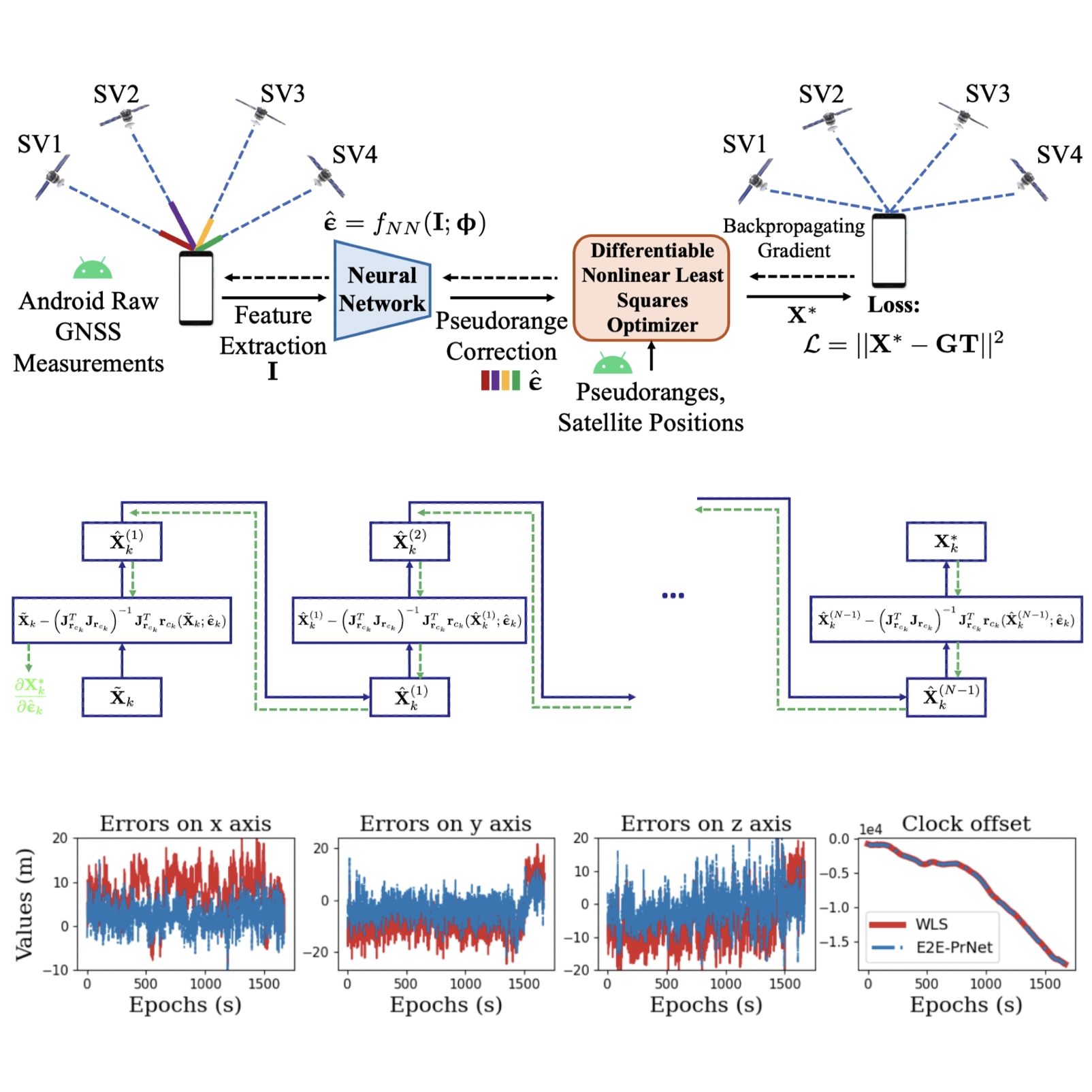
Towards End-to-End GPS Localization with Neural Pseudorange Correction
Xu Weng, KV Ling, Haochen Liu, Kun Cao IEEE/ISIF FUSION, 2024 code / arXiv / slides The first neural ranging correction framework trained end-to-end through a differentiable localization engine. |
|
Localization with Noisy Android Raw GNSS Measurements
Xu Weng, KV Ling IEEE APWiMob, 2023 (Best Paper Award) code / arXiv An open-source positioning toolbox for noisy Android raw GNSS measurements |